


Section: New Results
Walking Speed Detection on a Treadmill using an RGB-D Camera
Participants : Baptiste Fosty, François Brémond.
keywords: RGB-D camera analysis, older people, serious games
Within the context of the Az@Game project, we have studied the potential of the RGB-D camera (Red Green Blue + Depth) for the control of a serious game dedicated to older people suffering from Alzheimer disease. Within this game, the patient is invited to perform some physical and cognitive tasks (walking on a treadmill at different speeds, performing gestures to control his/her character in the game, managing money) in order to assess the evolution of the disease, to stimulate them and improve their abilities. In this context, one of our goal is the computation of the walking speed of a person on a treadmill.
|
The proposed solution is divided into three distinct steps :
-
people detection and tracking using a background subtraction algorithm.
-
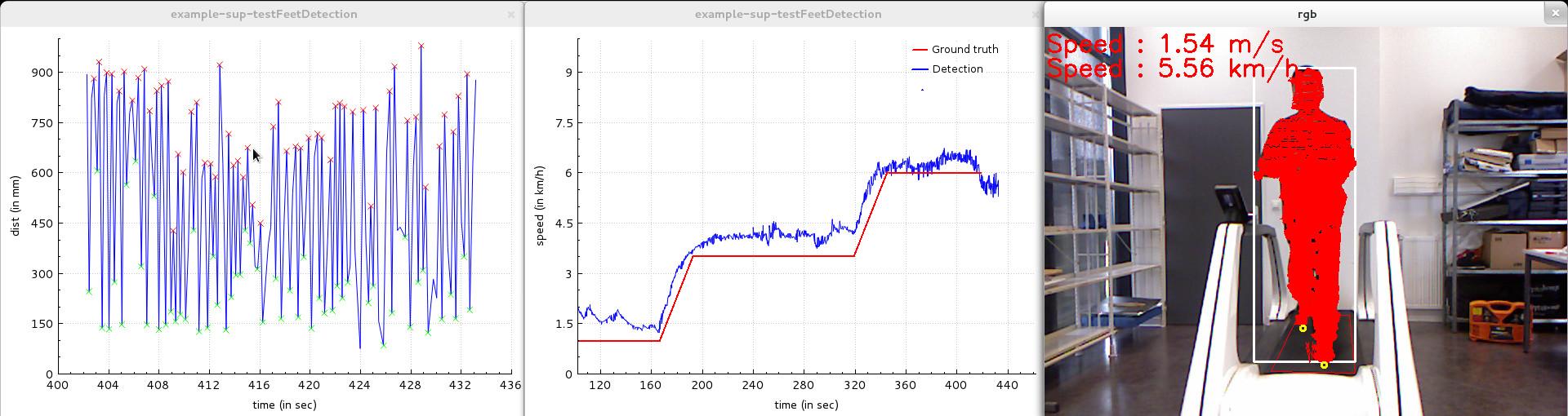
feet detection : based on the cloud of 3D points of the person, and more particularly on the lower body part, the axis of each leg is computed. The corresponding foot is then defined as the projection of the lowest point of the leg on the leg axis (see Fig. 38 , right picture).
-
speed computation : computed from the successive positions of the feet, more precisely from the distances between the feet (see Fig. 38 , left graph representing the distance between the feet). Each time this distance reaches a local maximum (corresponding to each step), the current speed is computed as the maximum over the time since the last step. The speed is then averaged with the previous computed speed to smooth the values (see Fig. 38 , middle graph representing the speed in function of time).
Concerning the results, the first experimentation of the algorithm shows that, qualitatively, the computed walking speed is proportional to the real speed. Future work will focus on experimenting the proposed system on a larger scale (different people, location, etc.) in order to validate the approach. We will also focus on trying to detect arm gestures to have more control on the serious game.
About the Dem@Care project and the previous work on the activity recognition system developed to extract automatically and objectively evidences of early symptoms of Alzheimer's disease for older people, this contribution has been published at ASROB 2013, Workshop on Assistance and Service Robotics in a Human Environment (see [38] ).